Middleware allows the
development of transparent distributed network applications while providing
mechanisms that enhance application response at run-time. In particular,
varying requirements (often stated as
quality of service
parameters)
have lead to the specification of RT-CORBA [
M1],
real-time Java [
M2][
M3]
and distributed real-time Java [
M4]. These
promise to simplify the development of distributed application with complex
QoS requirements, such as stringent latency, jitter and dependability needs.
On the other hand, standard middleware infrastructures such as CORBA [
M5],
COM+ [
M6] [
M7],
and MOM [
M8] were conceived for static distributed
systems and require considerable resources at run-time. (A number of related
systems were built using CORBA, such as a distributed robotic system [
M9]
and a distributed supervisory control scheme for control devices [
M10].)
Thus, they are not well suited for highly mobile environments, where resource
and power constraints, as well as security issues (authentication, authorization
and communication secrecy or integrity) pervade the application. Furthermore,
the specification and enforcement of QoS present interesting challenges
in mobile environments, due to their lack of support for continuous flow
of information over error-prone channels and the notion of an on-going
communication activity with an associated QoS. Meta-programming techniques
are becoming a popular way to enable distributed real-time systems that
are adaptable, flexible, configurable, predictable [
M11][
M12]
and composable [
M13]. We used a meta-programming
architecture based on a two-level reflective middleware model [
M14]
to develop a QoS-enabled reflective middleware framework, called CompOSE|Q
[
M15] and we propose to follow the same
model in order to design an adaptive robotic middleware framework (ARM)
capable to provide an adaptive communication environment, and mechanisms
to handle location and power awareness required by DRSs. Since robots use
captured video to add visuomotor coordination to their behavior, video
transmission becomes a critical issue in the design of the overall architecture.
In such a sense, video transmission has an important impact on the required
QoS. That is, video transmission needs a continuous circuit-switch like
connection requiring certain QoS guarantees such as fast, predictable and
loss-free forwarding of data packages. However, robot's mobility may create
situations where QoS for video transmission cannot be provided, due to
handovers between access routers or network gateways, or frequent notifications
that may overload the network resources and/or QoS renegotiation. As a
result, QoS and mobility mechanisms should be aware of each other. Thus,
the ARM should be able to follow the robot's movement fast enough to minimize
the QoS disruption caused to the video transmission. In order to do that,
the ARM must track the robot's location and provide coordination between
the handover management and the QoS broker. In our prototype, each robot
tracks its location using a GPS (
Global Positioning System), which
is used to trigger the handover management initiation. Assuming that all
handovers are planned, the handover initiation determines the type of handover
required and sends the corresponding signal message to the QoS broker,
which will react to it preparing advance resource reservations along the
new route using MRSVP (
mobile RSVP). Also, we define three types
of handover depending on if the network layer is involved in the handover:
Another aspect of the
design is how to keep the mobile robot software up to date. In order to
achieve this, we define a mobile API for mobile aware software and
provide a dynamic reconfiguration module that keeps track of dependence
management and automatically updates software components with minimum disruption
and a profile module that gathers specific information in order to (1)
specify and manage software updates (what, when and how to change), possibly
including installation and uninstallation of services and (2) preservation
of application and service properties (safety and liveness) that guarantee
system consistency and correctness. On the other side, the ARM components
should be aware of the underlying access network characteristics and their
core protocols in order to access their resources efficiently and transparently.
Hence, the ARM should provide an interface that allows unified access to
the (heterogeneous) underlying networks. We propose to follow the UMTS
adaptation layer specification, taking advantage of the fact that UMTS
represents a transition bridge between the 2nd and 3rd
generation of mobile services and, initially use GPRS (general packet
radio service) as the underlying telecommunication system. GPRS introduces
packet-oriented traffic in GSM (global system for mobile communications)
and its connectionless network service is suitable for applications based
on the Internet protocol IP. Furthermore, GPRS offers a way to specify
a QoS profile, which can be tailored to enforce QoS constraints. For example,
the ARM can enforce
high service precendence, 2nd reliability
class and 1st delay class for video trasmission, which will
enable the use of UDP as a transport protocol, avoiding flow control and
the complexities of the current designs of TCP for mobile environments.
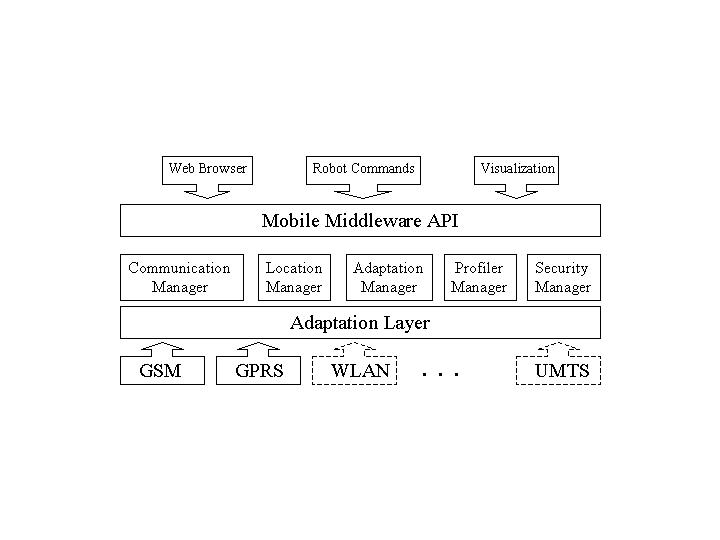
As a first step towards
this goal, DRS, we provide an adaptive robotic middleware framework as
shown in figure 3. It provides a comprehensive set of basic communication
services and an appropriate transfer system offering transparency of the
underlying heterogeneous UMTS network to support basic communication and
common application services [M16].